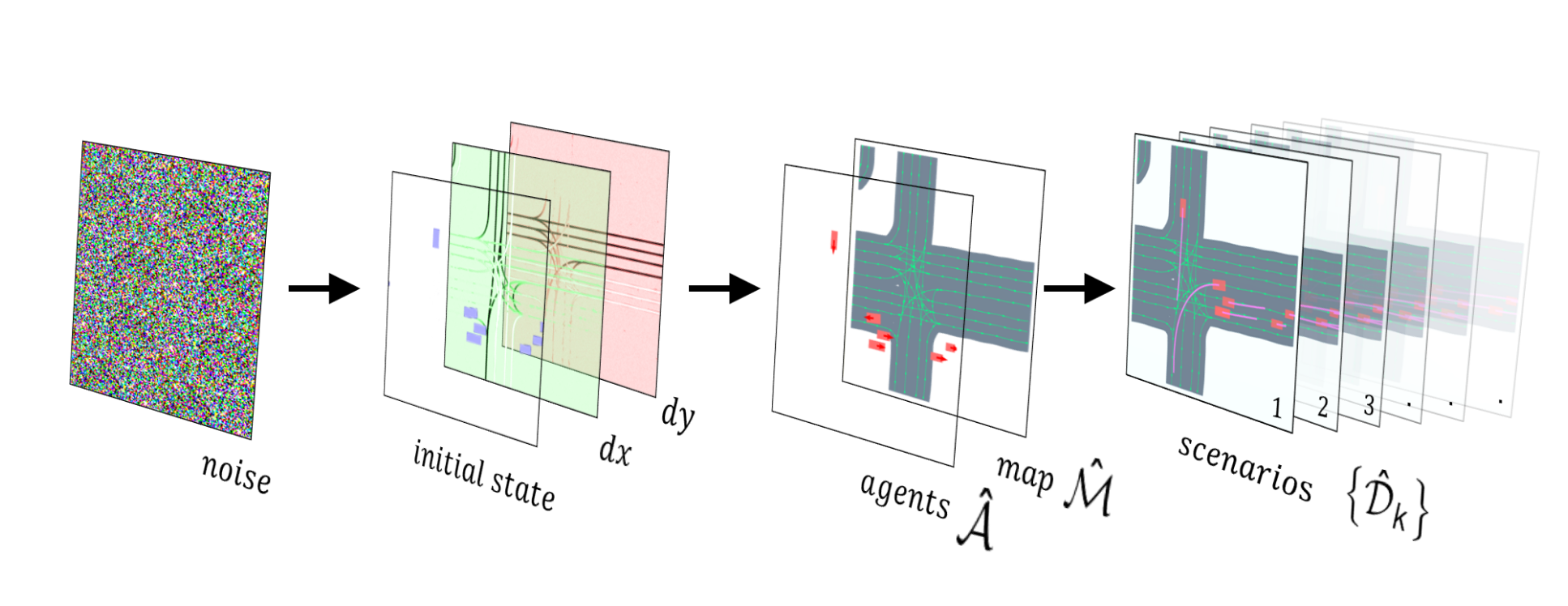
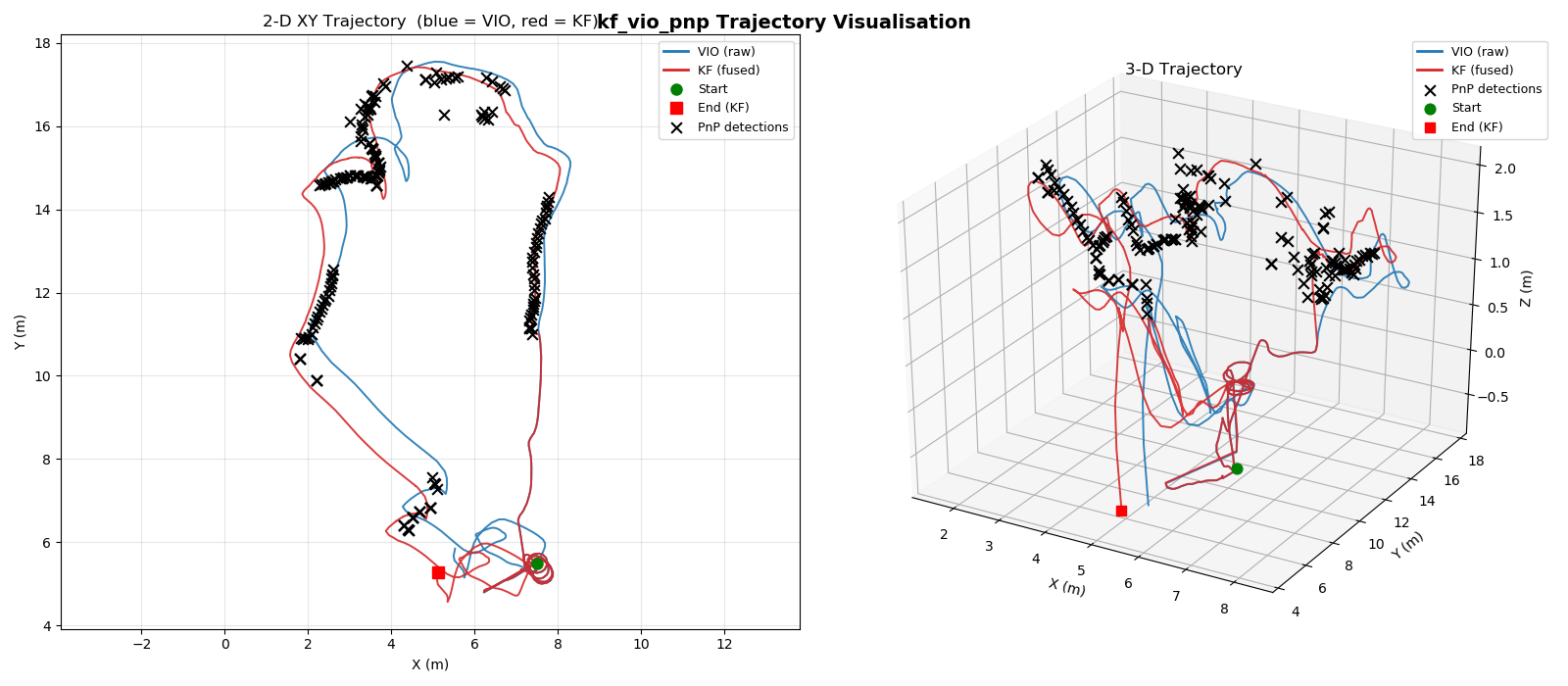
research learning agile gate traversal via analytical optimal policy gradient Quadrotor Traversing the Moving Gate DriveSceneGen get_hand_dirty Quadrotor Agile Flight Hardware demo, with PX4 FCU and Vicon. Quadrotor Inverted pendulum A MATLAB Simscape Simulation, with LQR controller. Error-state Kalman filter with Omni-Cameras PnP and VIO cooperate with ShengAo Wang, Yichao Gao, Yucong Wang, Nuthasith Gerdpratoom.